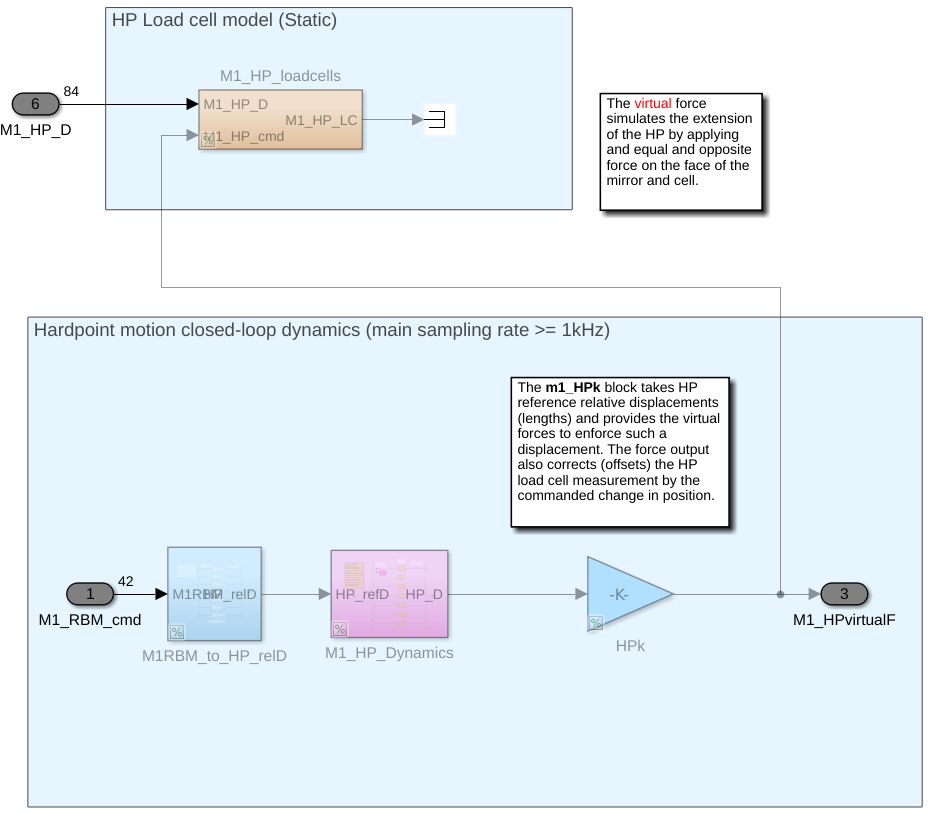
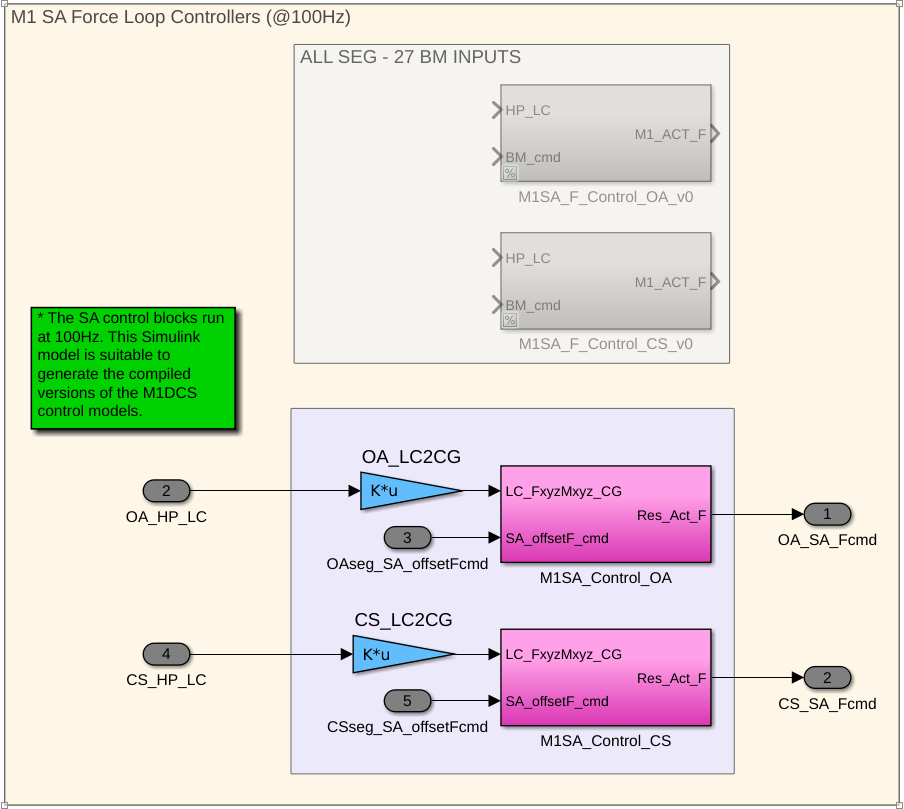
The M1 control system is made of 3 controllers for the hardpoints, for the actuators of the center segment and for the actuators of the outer segment.
| Types | Read | Write | Size |
|---|
gmt_m1::segment::HardpointsForces<ID> | X | - | - |
gmt_m1::segment::BarycentricForce<ID> | - | X | 6 |
gmt_m1::segment::HardpointsMotion<ID> | X | - | 12 |
| Types | Read | Write | Size |
|---|
gmt_m1::segment::HardpointsForces<ID> | - | X | 6 |
gmt_m1::segment::RBM<ID> | X | - | 6 |
| Types | Read | Write | Size |
|---|
gmt_m1::segment::ActuatorAppliedForces<ID> | - | X | 306/335 |
gmt_m1::segment::BarycentricForce<ID> | X | - | 6 |
gmt_m1::segment::ActuatorCommandForces<ID> | X | - | 306/335 |